
自動車ソフトウェア開発において、「Model in the Loop(MIL)」は非常に重要なテスト手法のひとつです。
この章では、ISTQB Automotive Software Tester シラバスの Chapter 3「Testing in Virtual Environments」 における3.2.1「Model in the Loop」を中心に、MILの概念・目的・実際のテスト環境構成・利点と限界について詳しく解説します。
🔧 1. X-in-the-Loop(XiL)とは?
まず、「Model in the Loop(MIL)」を理解するためには、その上位概念である X-in-the-Loop(XiL) の理解が欠かせません。
XiLとは、開発・検証プロセスにおいて、あるシステム要素を“ループ(循環系)”の中でシミュレーション・評価する仕組みです。
「X」には以下のような複数の種類があります。
|
種類 |
名称 |
概要 |
|---|---|---|
|
MIL |
Model in the Loop |
モデルを使った早期シミュレーション |
|
SIL |
Software in the Loop |
コードを実行可能な形式に変換し、仮想環境でテスト |
|
HIL |
Hardware in the Loop |
実機ハードウェアを用いて実時間でテスト |
|
PIL |
Processor in the Loop |
実際のプロセッサを使ってコードを評価 |
|
VIL |
Vehicle in the Loop |
実車を含む総合テスト |
※ISTQB Automotive Testerシラバスでは、MIL / SIL / HILが中心的に扱われ、PILやVILは範囲外です。
🧩 2. Model in the Loop(MIL)の概要
Model in the Loop(MIL) とは、システム開発の初期段階で、
制御対象(プラント)と制御ロジック(コントローラ)を“モデル”として構築し、
それらをシミュレーションによって検証する手法です。
これは、実機ハードウェアを使う前の段階で、アルゴリズムや制御動作を確認する目的で行われます。
🔍 具体例:DCモーター制御の開発
たとえば、DCモーターの速度制御システムを設計する場合を考えます。
-
プラントモデルの作成
→ モーターの動特性(トルク、慣性、摩擦など)をシミュレーション環境(例:Simulink)でモデル化。
-
コントローラモデルの作成
→ PID制御などのアルゴリズムをモデルとして実装。
-
ループを形成して動作確認
→ コントローラモデルとプラントモデルを接続して、入力信号に対する出力(回転数など)をシミュレーション。
-
結果を解析・最適化
→ 制御ロジックが適切に機能しているか、過剰応答や遅れがないかを評価。
この一連の流れが Model in the Loop(MIL) です。
💻 3. MILテスト環境の構成
MIL環境では、テスト対象(被験物)はモデルとして実行可能な形式で存在します。
ただし、まだ実機用ハードウェアにはコンパイルされていません。
構成イメージ:
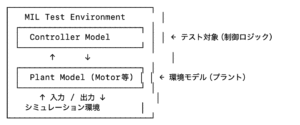
このように、テスト対象モデルと環境モデルが仮想的に接続された「閉ループ系」 で構成されます。
⚙️ 4. MILの目的と利点
|
項目 |
説明 |
|---|---|
|
早期検証 |
コード化・ハード結合前に、制御ロジックをテスト可能 |
|
コスト削減 |
実機試験に比べ、環境構築やリスクが低い |
|
エラー検出の早期化 |
要件やアルゴリズムの欠陥を初期段階で発見 |
|
反復改善が容易 |
モデルを変更して再シミュレーションが可能 |
|
停止・観察が容易 |
任意の時点でシミュレーションを一時停止し、詳細解析ができる |
⚠️ 5. MILの制約・限界
-
リアルタイム性がない:シミュレーション時間で動作するため、実時間とは異なる。
-
物理的要因の再現が難しい:ノイズ、温度変化、センサー劣化などは再現困難。
-
複雑化による負荷増大:モデルの規模が大きくなるほど、PCの演算負荷が増える。
そのため、MILで得られた結果はあくまで「モデル上の結果」であり、実際のハードウェアテスト(SIL/HIL)での確認が不可欠です。
🧠 6. MILと他のXiL環境との関係(比較表)
|
特徴 |
MIL |
SIL |
HIL |
|---|---|---|---|
|
対象 |
モデル |
ソフトウェアコード |
実ハードウェア |
|
実行速度 |
シミュレーション時間 |
準リアルタイム |
実時間 |
|
リスク |
低い |
中 |
高い(実機使用) |
|
コスト |
安い |
中 |
高い |
|
主な目的 |
機能設計の検証 |
実装検証 |
統合・安全確認 |
|
使用ツール例 |
MATLAB/Simulink |
C/C++シミュレータ |
dSPACE, ETAS等 |
📝 7. 試験対策ポイント(ISTQB Automotive Tester)
-
MILの定義:「コントローラモデルをプラントモデルに対して仮想環境で検証する手法」
-
MILで検証する目的:開発初期段階でアルゴリズムや制御設計を早期に評価するため
-
MILでの実行時間:リアルタイムではなく、シミュレーション時間である
-
テスターの役割:テスト環境の理解、入力/出力の観察、異常時の停止・解析
💡 8. まとめ
Model in the Loop(MIL)は、**「仮想的に現実を再現することで、より早く安全に問題を発見する」**ための重要なステップです。
実際の自動車開発プロセスでは、MIL → SIL → HIL の順にテストを進めることで、
安全性・信頼性・コスト効率を両立させることができます。



コメント